图灵机由Alan Turing于1936年发明,用于接受递归可枚举语言(由Type-0语法生成)。
图灵机由无限长的磁带组成,可以在磁带上执行读写操作。磁带由无限个单元组成,每个单元上要么包含输入符号,要么包含一个称为空白的特殊符号。它还包括一个指向当前正在读取的单元格的头指针,它可以向两个方向移动。
![图片[1]-TOC中的图灵机-yiteyi-C++库](https://www.yiteyi.com/wp-content/uploads/geeks/20210704/geeks_turing300x146-200x97.png)
图:图灵机
TM表示为7元组(Q,T,B,∑, δ、 q0,F)其中:
- Q 是一组有限的状态
- T 是磁带字母表(可以写在磁带上的符号)
- B 是空白符号(除了最初输入的字母表外,每个单元格都用B填充)
- ∑ 是输入字母表(属于输入字母表的符号)
- δ 是一个映射Q×T的转移函数→ Q×T×{L,R}。根据其当前状态和当前磁带字母表(由磁头指针指向),它将移动到新状态,更改磁带符号(可能更改或可能更改),并将磁头指针向左或向右移动。
- q0 是初始状态吗
- F 是最终状态的集合。如果达到F的任何状态,则接受输入字符串。
让我们为L={0^n1^n |n>=1}构造一个图灵机
- Q={q0,q1,q2,q3},其中q0是初始状态。
- T={0,1,X,Y,B},其中B表示空白。
- ∑ = {0,1}
- F={q3}
表1给出了过渡函数δ:
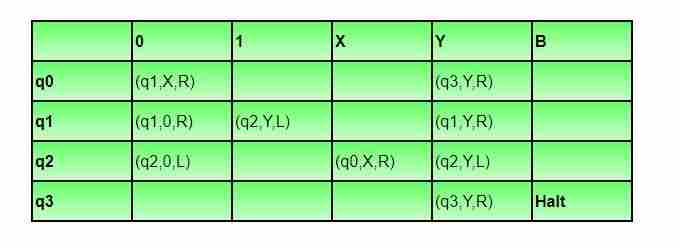
插图
让我们看看这台图灵机是如何为0011工作的。最初,head指向带下划线的0,状态为q0,如下所示:

移动将是δ(q0,0)=(q1,X,R)。这意味着,它将进入状态q1,将0替换为X,头部将向右移动,如下所示:

移动将是δ(q1,0)=(q1,0,R),这意味着它将保持在相同的状态,并且在不改变任何符号的情况下,它将向右移动,如下所示:

移动将是δ(q1,1)=(q2,Y,L),这意味着它将移动到q2状态,并将1更改为Y,它将向左移动,如下所示:

以同样的方式操作,机器将达到状态q3,头部将指向B,如图所示:

使用移动δ(q3,B)=停止,它将停止并接受。
注:
- 在非确定性图灵机中,对于给定的状态和磁带符号,可以有多个可能的移动,但非确定性TM不会增加任何功率。
- 每个非确定性TM都可以转换为确定性TM。
- 在多磁带图灵机中,可以有多个磁带和相应的头部指针,但它不会给图灵机增加任何功能。
- 每个多磁带TM都可以转换为单磁带TM。
问题: 单磁带图灵机M有两种状态q0和q1,其中q0是起始状态。M的磁带字母表是{0,1,B},其输入字母表是{0,1}。符号B是用于表示输入字符串结束的空白符号。下表描述了M的过渡函数。
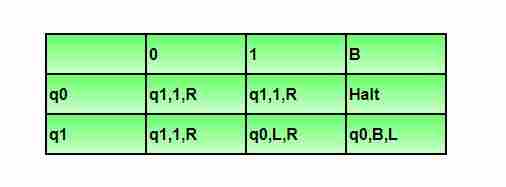
该表的解释如下所示。第q0行和第1列中的条目(q1,1,R)表示,如果M处于状态q0,在当前磁带方格上读取1,则它在同一磁带方格上写入1,将其磁带头向右移动一个位置,并转换到状态q1。关于M,以下哪项陈述是正确的?
- M不会在(0+1)中的任何字符串上停止+
- M不会停在(00+1)中的任何字符串上*
- M在以0结尾的所有字符串上暂停
- M在以1结尾的所有字符串上暂停
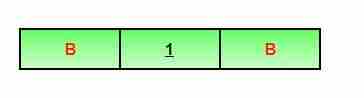
解决方案:让我们看看机器是否在字符串“1”上停止。初始状态为q0,头部指向1,表示:
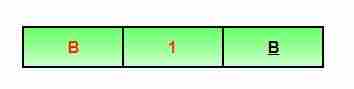
使用δ(q0,1)=(q1,1,R),它将移动到状态q1,头部将向右移动,如下所示:

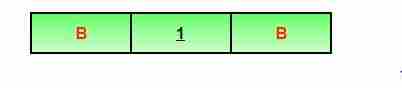
使用δ(q1,B)=(q0,B,L),它将移动到状态q0,头部将向左移动,如下所示:
它将以同样的方式一次又一次地运行,而不会停止。
选项D表示M会在所有以1结尾的字符串上暂停,但它不会暂停1。因此,选项D是不正确的。
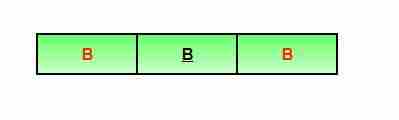
让我们看看机器是否在字符串“0”上停止。初始状态为q0,头部指向1,表示:

使用δ(q0,0)=(q1,1,R),它将移动到状态q1,头部将向右移动,如下所示:
使用δ(q1,B)=(q0,B,L),它将移动到状态q0,头部将向左移动,如下所示:
它将以同样的方式一次又一次地运行,而不会停止。
选项C表示M会在所有以0结尾的字符串上暂停,但不会在0处暂停。所以,选项C是不正确的。
选项B表示TM不会因任何字符串(00+1)*而停止。但是空字符串是(00+1)*的一部分,对于空字符串,TM将停止。对于空字符串,磁带将,
使用δ(q0,B)=halt,TM将停止。由于TM暂停为NULL,此选项也不正确。 因此,选项(A)是正确的。
本文由 奏鸣曲 。如果您发现任何不正确的地方,或者您想分享有关上述主题的更多信息,请发表评论
![关于”PostgreSQL错误:关系[表]不存在“问题的原因和解决方案-yiteyi-C++库](https://www.yiteyi.com/wp-content/themes/zibll/img/thumbnail.svg)